




Вчені створили екзоскелет для навчання роботів

Дослідники з Національного університету оборонних технологій Китаю та компанія Midea Group представили систему HumanoidExo — носимий пристрій, який фіксує рухи людини та перетворює їх на структуровані дані для навчання роботів.


Експерти мають на меті вирішити одну з найскладніших задач робототехніки — навчити гуманоїдних ботів рухатися як люди без збору тисяч дорогих демонстрацій.
Під час випробувань робот-гуманоїд Unitree G1, навчений за новим методом, зміг виконувати складні маніпуляції та навіть ходити після всього кількох прикладів.
«Суттєвим вузьким місцем у навчанні роботів є отримання масштабних і різноманітних наборів даних, оскільки збір достовірної інформації з реального світу залишається складним і дорогим», — зазначили дослідники.
Гуманоїдні боти часто не можуть повноцінно відтворювати рухи людей, оскільки їхнє навчання базується на відео та симуляціях. HumanoidExo усуває цей розрив, фіксуючи реальні рухи.
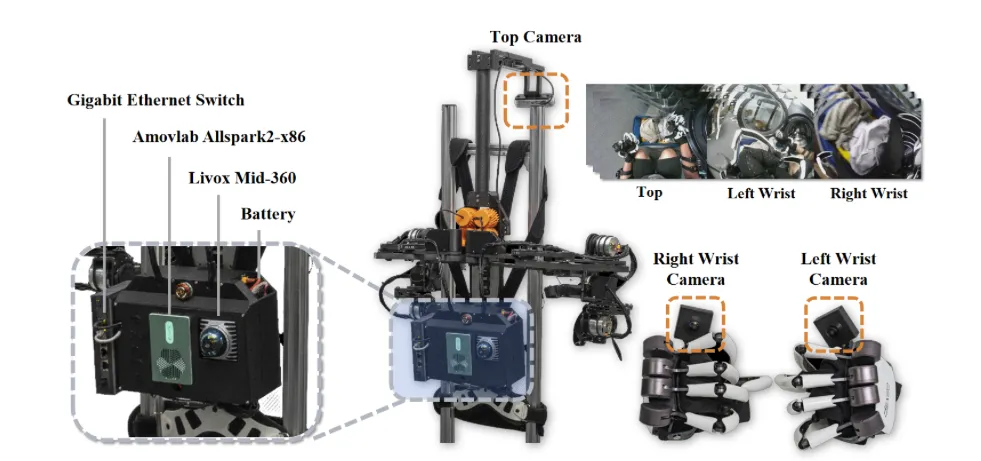
Костюм напряму співставляє сім суглобів руки людини з конфігурацією робота. Він використовує інерційні сенсори на зап’ястях та LiDAR-модуль на спині для відстеження положення корпусу та зросту людини.
Потік інформації надходить у дворівневу ШІ-систему HumanoidExo-VLA. Вона включає модель типу Vision-Language-Action, яка інтерпретує завдання, та контролер з навчанням з підкріпленням, що забезпечує баланс і стійкість рухів.
За словами дослідників, Unitree G1 навчений всього на п’яти керованих тілом демонстраціях та 195 сеансах, записаних за допомогою екзоскелета. Така гібридна комбінація підвищила успішність виконання завдання з перенесення предметів з 5% до приблизно 80%, що відповідає показнику моделі, навченої на 200 демонстраціях.
Екзоскелет зафіксував ходьбу людини до столу, після чого робот навчився ходити, хоча в його навчальних даних не було подібних прикладів.
За даними експертів, бот успішно виконав усі завдання з пересування і зміг продовжувати роботу з предметами без втрати рівноваги.
В одному з тестів учені фізично штовхнули робота — він самостійно повернувся у вихідну позицію та завершив завдання.
Нагадаємо, у серпні Nvidia презентувала пакет ШІ-моделей, бібліотек та інших елементів інфраструктури для розробників робототехніки.